Yorie Nakahira
Assistant Professor in CMU, ECE
I've graduated from Caltech, John Doyle's group in 2019.
This is a temporary website about me. Official group website coming soon...
Hiring!
My group has openings for PhD students and postdocs. Please email me if interested :)
Research
Imagine a hyper-connected world in which stable, robust and efficient autonomous devices seamlessly integrate through the Internet of Things (IoT) to aid people. To achieve stability and robustness, these devices should be equipped with real-time learning and control algorithms that autonomously optimize policies in response to internal and external changes. Such algorithms should be efficient and implementable on-board, even in low-cost hardware. However, their limited hardware and large scale may cause noisy signals and require distributed control and/or asynchronous computation. The goal of my research is to create theoretical foundations and computational tools to enhance the stability, robustness, and efficiency of autonomous systems.
Control: Achieving robustness despite communication constraints

Autonomous systems are generally composed of interconnected components that have limited sensing, actuation, or communication capabilities. The control of such systems must be robust and efficient in the presence of these limitations. Toward this end, we construct a controller subject to delay and quantization that attains the optimal worst-case cost and a controller that attains the greedy-optimal average-case cost. Moreover, we interpolate the worst-case and average-case optimal controllers to create a hybrid controller that benefits both cases. The resultant hybrid controller maintains near-optimal performance for both costs with reduced computation and memory requirements. For large-scale networks, we use a linear program to jointly design distributed control and communication policies, which have performance guarantees in the presence of time-varying delays, quantization, saturation, and sampling.
Yorie Nakahira and Lijun Chen. An integrative perspective to LQ and L-infinity control for delayed and quantized systems. Submtted to IEEE Transactions on Automatic Control, 2019.
Yorie Nakahira. LQ vs. l-infinity in controller design for systems with delay and quantization. IEEE 55rd Annual Conference on Decision and Control, 2016. [Short] [Full]
Yorie Nakahira and Seungil You. A linear programming framework for networked control system design. 5th IFAC Workshop on Distributed Estimation and Control in Networked Systems, 2015.
We also applied the above results in neuroscience and cell biology. For further details, please see below.
Neuroscience: Integrating neurophysiology and sensorimotor
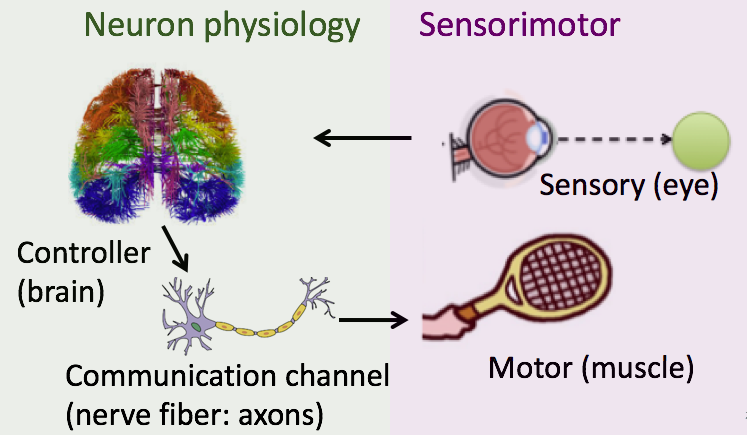
Human sensorimotor control is remarkably robust and efficient despite the nervous system that is slow and/or inaccurate. More broadly, there are huge variations and tradeoffs in speed and accuracy both for one organism in different activities and between different organisms, including the classic example of Fitts' law. While all mammals have the same basic neural hardware, here too there is huge heterogeneity in nerve size, composition, speed, and accuracy within and between organisms. Although these diversities are well studied in sensorimotor control using control theory and separately in the nervous system using information theory, there has been little rigorous theory to connect the system level (sensorimotor control) with the component level (neurophysiology). We aim to close this gap using optimal and robust control theory and information theory. Having a coherent and integrated theory clarifies the benefits of extreme performance heterogeneity in sensorimotor control and the necessity of even greater heterogeneity in nerve composition and behavior. Slides
Theory
Yorie Nakahira*, Quanying Liu*, Terry Sejnowski, and John C. Doyle. Fitts' Law for speed-accuracy trade-off describes a diversity-enabled sweet spot in sensorimotor control
Yorie Nakahira*, Quanying Liu*, Terry Sejnowski, and John C. Doyle. Diversity-enabled sweet spots in layered architectures and speed-accuracy trade-offs in sensorimotor control
Yorie Nakahira, Quanying Liu, Natalie Bernat, Terry Sejnowski, and John C. Doyle. Theoretical foundations for layered architectures and speed-accuracy tradeoffs in sensorimotor control (<- material for our class project)
Yorie Nakahira, Nikolai Matni, and John C. Doyle. Hard limits on robust control over delayed and quantized communication channels with applications to sensorimotor control. IEEE 54rd Annual Conference on Decision and Control, 2015.
Our experimental platform and result (<- material for our class project)
Quanying Liu, Yorie Nakahira, Ahkeel Mohideen, Adam Dai, Sunghoon Choi, Angelina Pan, Dimitar M. Ho, and John C. Doyle. Experimental and educational platforms for studying architecture and tradeoffs in human sensorimotor control
Manual and code to set up our platform, by Quanying Liu and Ahkeel Mohideen
Cell biology: Understanding fundamental limits in biomolecular control
Understanding the design principles of biomolecular systems is of crucial importance in cell biology. The control of these systems is typically implemented via chemical reactions, which imposes great limitations in sensing, communication, and actuation. We characterize the performance limits in feedback control and introduce a novel concept, the degradation efficiency, to quantify the impact of a chemical species degradation on the control performance. Our lower bound suggests that high molecular flux, not high molecular count, is important for accurate control, contrary to the common belief that the molecular count is the dominant factor.
Yorie Nakahira, Fangzhou Xiao, Victoria Kostina, and John C. Doyle. Fundamental limits and achievable performance in biomolecular control, Accepted to the 2018 American Control Conference, [Short][Full(under preparation)].
Scheduling: Enhancing scalability and efficiency in online scheduling

Large-scale service systems, such as power stations and cloud computing, present tremendous challenges in terms of controlling their strain on the power grid and the cloud. Meanwhile, these systems also present a great opportunity to exploit the flexibility in service speed and duration of each job. In view of these challenges and opportunities, we develop low-complexity online scheduling algorithms with stable and predictable resource consumptions. We have proposed the smoothed least-laxity-first algorithm, which performs near optimally in electric vehicle charging stations at Caltech (in the figure above) and prolongs the vehicles' battery lifetimes by avoiding unnecessary oscillations.
Yorie Nakahira, Andres Ferragut, and Adam Wierman. Generalized Exact Scheduling: a Minimal-Variance Distributed Deadline Scheduler, Submitted to Operations Research, 2019.
Yorie Nakahira, Andres Ferragut, and Adam Wierman. Minimal-Variance Distributed Deadline Scheduling in a Stationary Environment, 36th International Symposium on Computer Performance, Modeling, Measurements and Evaluation (Performance).
Yorie Nakahira, Niangjun Chen, Lijun Chen, and Steven H. Low. Smoothed Least-laxity-first Algorithm for EV Charging, The Eighth International Conference on Future Energy Systems, 2017.
Security: Improving fault tolerance in estimation and inference

A cyber-physical system is vulnerable to various faults due to its distributed nature. Examples of these faults are hijacking, natural disasters, infrastructure wear, which can be caused by either malicious agents or unforeseen accidents. Therefore, the control of such systems should be equipped with safety critical processes that tolerate a wide range of faults. We have proposed both a state estimator and an inference algorithms for system parameters, which have provable performance guarantees in the presence of sparse faults. Our algorithms, when incorporated into the control of cyber-physical systems, can help mitigate human injuries or economic damage of these faults.
Yorie Nakahira, Yilin Mo. Attack-resilient H2, H-infinity, and L1 state estimator, Accepted to IEEE Transactions on Automatic Control. [Short][Full]
Ye Yuan, Yorie Nakahira, Claire J. Tomlin. On identification of parameterized switched linear systems. The 35th Chinese Control Conference, 2016.
Yorie Nakahira, and Yilin Mo. Dynamic state estimation in the presence of compromised sensory data. IEEE 54rd Annual Conference on Decision and Control, 2015. [Short][Full]
Teaching
Rethinking the fundamentals to improve techinical accessibility

The current control theory requires undergraduate and/or graduate level mathematics, which greatly hinders the prevalence of control theory. We are rethinking the fundamentals and have reproduced the basic theory using high school level mathematics. The simplified theory allows a broader audience to understand important concepts in feedback control. It is also incorporated into the introductory control theory class at Caltech, in which I served as a teaching assistant for two consecutive years.
John C. Doyle, Yorie Nakahira, Yoke Peng Leong, Emily Jenson, Adam Dai, Dimitar Ho, and Nikolai Matni. Teaching control theory in high school. IEEE 55rd Conference on Decision and Control, 2016.
John Doyle, and Yorie Nakahira. Universal Laws and Architectures. 35th Chinese Control Conference, 2016.
Course
Signals and Systems (Co-instructor, CMU, Spring 2020)
Universal laws and architecture in complex networked systems (TA, Lund University, Oct 2018)
CDS231 Linear Systems Theory (TA, Caltech, Fall 2017)
CDS112 Control System Design (TA, Caltech, Winter 2016)
Contact
Email: yorie[at]cmu.edu
Office: Porter Hall, B20