Fun with Robots

SpoonBot
SpoonBot is a simple table-top robot that you can build with your CMUcam3. It is one of the cheapest and smallest vision based robots with local processing that you can build in an afternoon. SpoonBot uses two continuous rotation servos to move forward, backward and turn left or right. There is a mini-servo under spoonBot that moves the spoon caster up and down giving spoonBot the ability to pan and tilt. I posted instructions on the project website for building your own!
[Project Website]

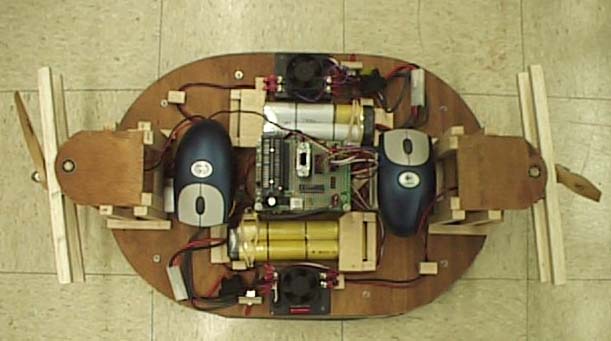
Barney Mobot
Barney is the robot that won the 2002 mobot slalom race at CMU. It was the first ever undergraduate mobot to complete the course. This link includes most of our design specs, many issues we encountered and a video of the actual race.
[Project Website]
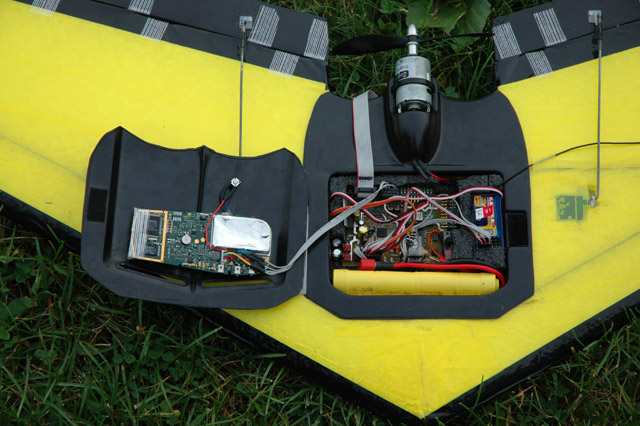
Fixed Wing UAV
This project is targeted towards surveillance or search and rescue situations were there is a need for quickly deployable remote telepresents. Our goal of creating a simplistic yet functional design is an ideal research and teaching platform for aerial robotics. You can find a picture of the electronics bay here and a picture of the main controller board here.
[First Flight]

DUI Mobot
DUI is a mobot made for the 2001 mobot slalom race at CMU. This link includes some design specs and a video of the actual race.
[Project Website]