Hyunggic !
-
Research:
Multi-Sensor Fusion for Moving Object Detection and Tracking:
DPMs for Urban Object Recognition
DPMs for Urban Object Recognition
Introduction
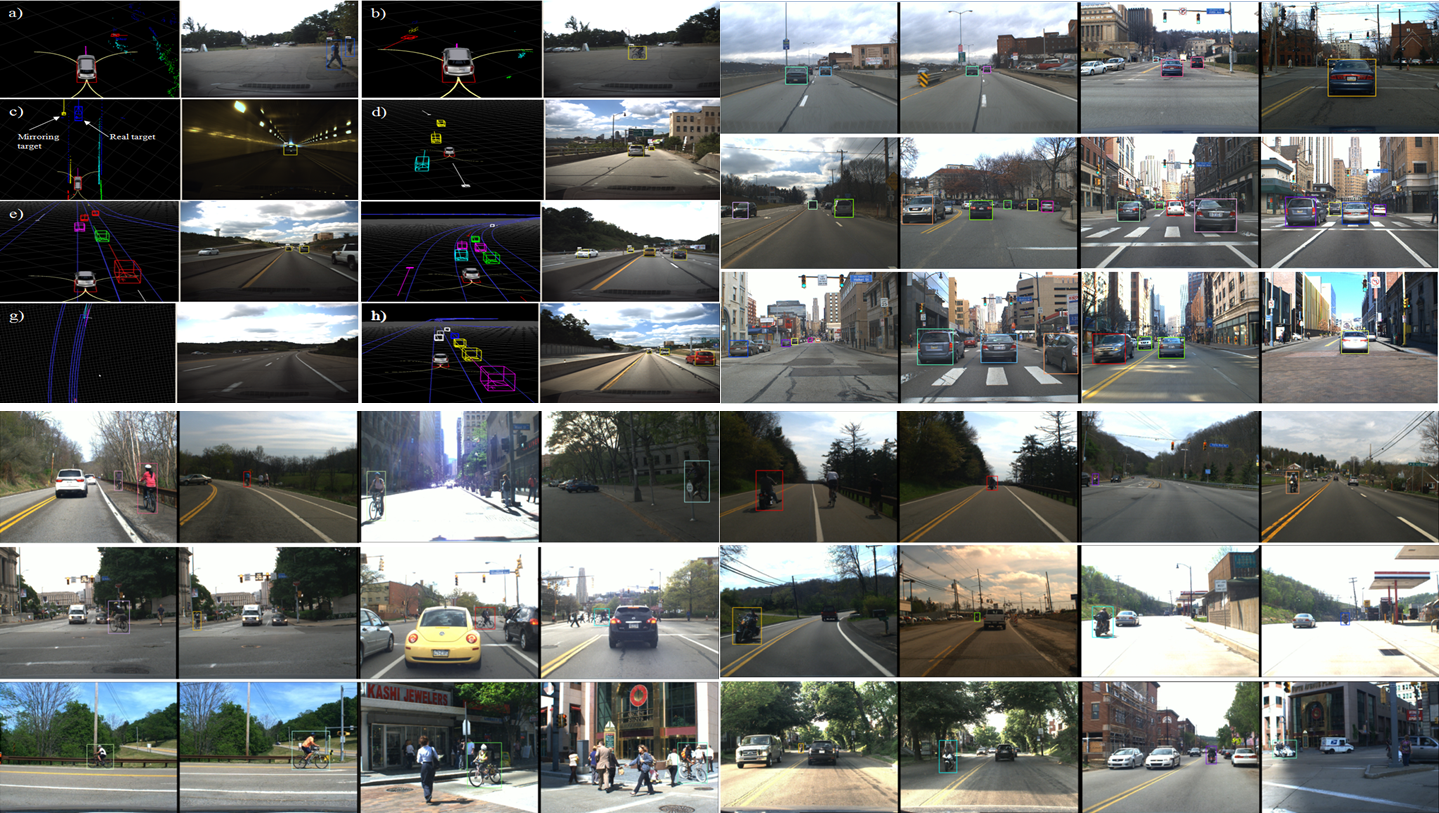
This page describes how we trained deformable part-based models for several important traffic participants such as vehicles, motorcycles, bicycles, and pedestrians. To this end, we collected so-called CMU Urban dataset which was specially designed for both autototive active safety applications such as FCW (Forward Collision Warning) and recognition systems for self-driving vehicles. It consists of vehicle (Sedan, SUV, Truck, Bus), bicyclist and motorcyclist datasets. For pedestrian, we use Caltech Pedestrian dataset. We also used the Caltech Pedestrian benchmark [1] for this work, meaning we use the 'seq' file format for video files and the 'vbb' file format for annotation files.
Many thanks to Piotr for his great work !
The datasets were very carefully collected based on our investigation about accident statistics of each object type. So, we believe that these datasets could be very valuable for those safety applications as well as recognition systems for self-driving vehicles. We used these models for our papers [2] or [3], i.e., active safety applications or autonomous driving.
[1] Pedestrian Detection: An Evaluation of the State of the Art
P. Dollar, C. Wojek, B. Schiele and P. Perona, PAMI, 2012.
[2] Real-Time Pedestrian and Vehicle Detection for Automotive Active Safety Systems
H. Cho, W. Zhang, S. W. Bang, B.V.K. Vijaya Kumar, ITS, 2014. (under review)
[3] A Multi-Sensor Fusion System for Moving Object Detection and Tracking in Urban Driving Environments, H. Cho, Young-Woo Seo, Raj (Ragunathan) Rajkumar, and B.V.K. Vijaya Kumar, ICRA, 2014.
- Vehicle dataset & Trained Vehicle Model: Vehicle DPM
- Bicyclist dataset & Trained Bicyclist Model: Bicyclist DPM
- Motorcyclist dataset & Trained Motorcyclist Model: Motorcyclist DPM