Hyunggic !
-
Research :
Vision-based Object Detection and Tracking :
Real-time Pedestrian and Vehicle Detection for Automotive Active Safety Systems
Real-time Pedestrian and Vehicle Detection for Automotive Active Safety Systems
Abstract
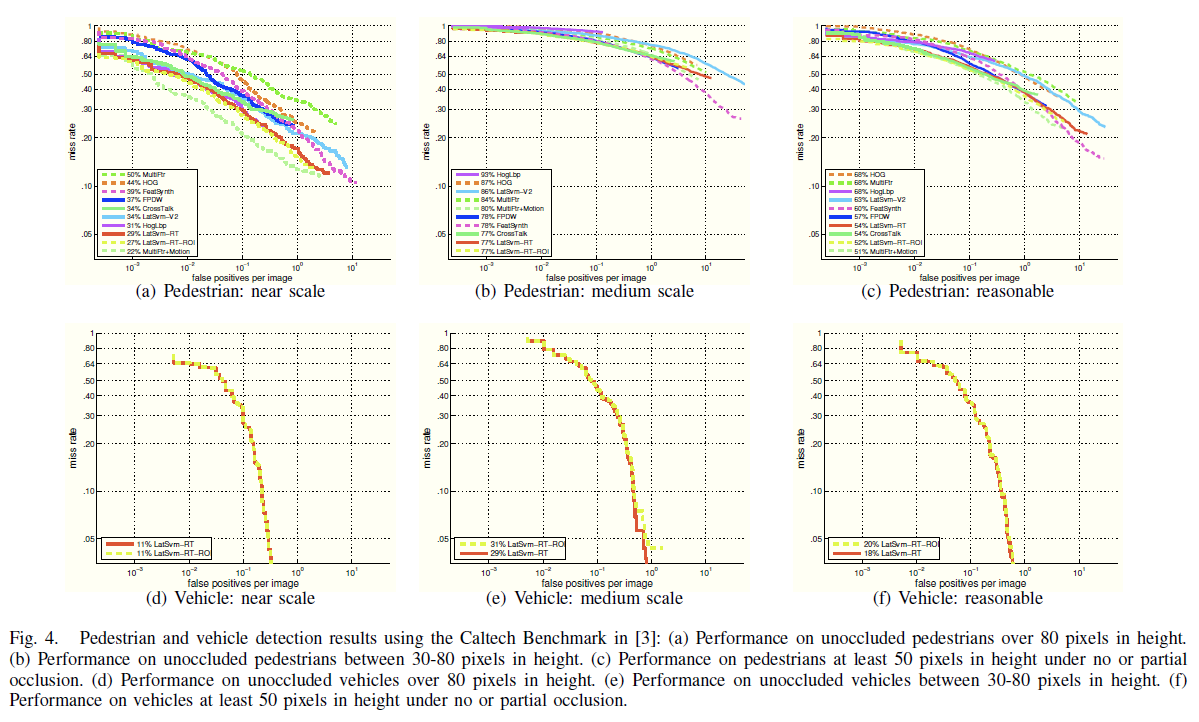
This paper presents a real-time pedestrian and vehicle detection system intended for use in automotive active safety applications. For a reliable and real-time performance in challenging real world conditions, we exploit one of the state-of-the-art object detection method called ‘deformable part-based model’ (DPM) and significantly improve its speed performance. We specifically exploit parallelism based on multi-cores and scene geometry to achieve a required runtime performance for the deformable part-based models. In addition, we improve pedestrian and vehicle detection accuracy by designing more optimized object models for automotive applications. We quantitatively evaluate our implementation using challenging real world datasets and the Caltech Pedestrian benchmark. Furthermore, we deploy the detection system to our autonomous vehicle and demonstrate real-time active safety functionalities for pedestrians and vehicles.
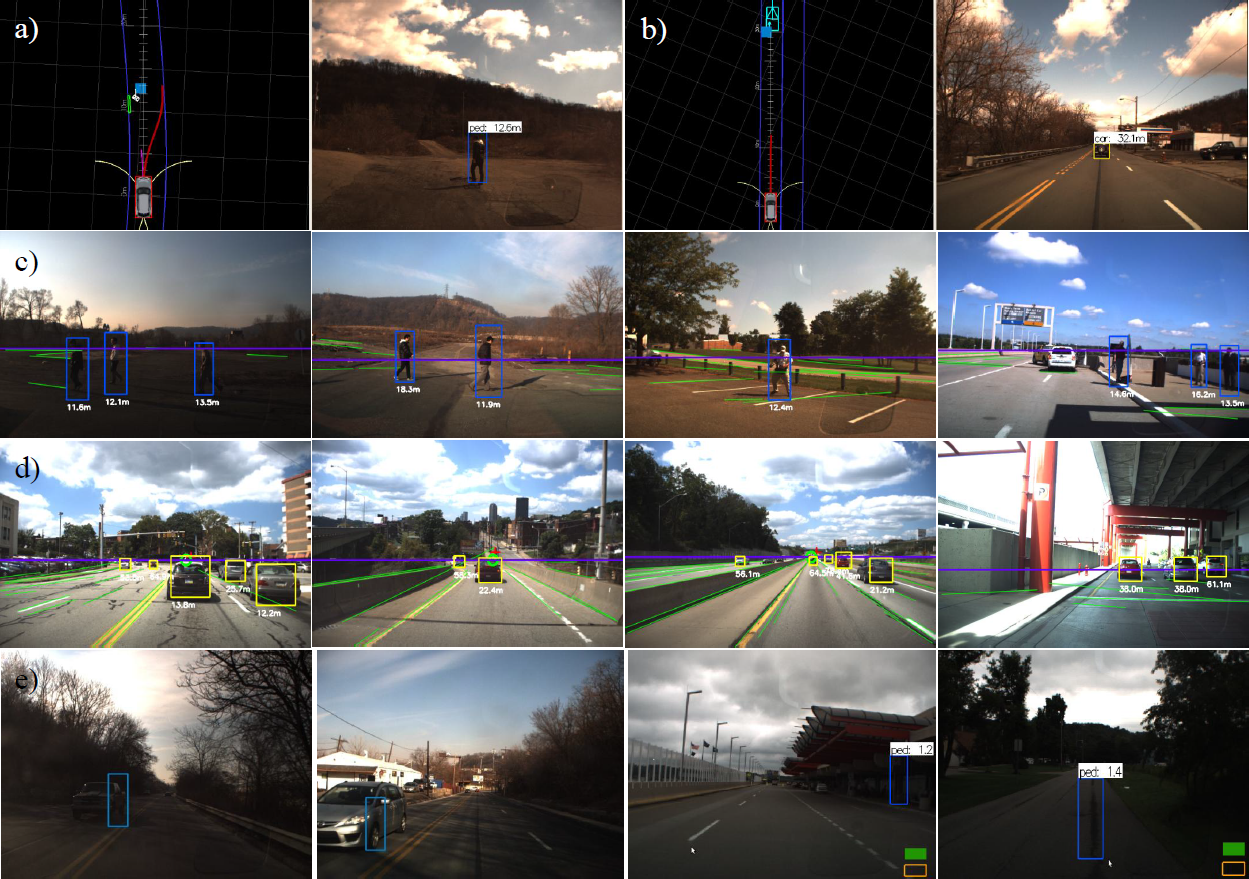
[Result Videos]
Note: Lidar data is just for visualization purpose here and detection results are purely vision-based !
1. Pedestrian detection result with vanishing point tracking
2. Vehicle detection result with vanishing point tracking: Part I
3. Vehicl detection result with vanishing point tracking: Part II
4. Pedestrian detection result at CMU Robot City Dataset: Stationary case
5. Vehicle detection result on Cranberry to Pittsburgh Airport Dataset: Part 1
6. Vehicle detection result on Cranberry to Pittsburgh Airport Dataset: Part 2
7. Vehicle and Pedestrian detection result on Cranberry to Pittsburgh Airport Dataset: Part 3